
کنترل دور موتور dc شاید در ابتدا خیلی ساده به نظر برسد و اعمال یک سیگنال pwm به خروچی همه چیز را حل کند ولی با اضافه شدن سنجش دور موتور به سیستم کنترلی باید بدانیم که rpm در زمان یک ثانیه حساب نمیشود و rpm واقعی نیاز به 60 ثانیه گذر زمان دارد و ما نیز برای تنظیم دقیق سیستم هر 60 ثانیه باید یک کنترل بر روی گردش موتور اعمال نماییم.یعنی اصولا به صورت هم زمان نمیتوان دور موتور را به میزان مورد نظر رساند.(البته تحت شرایطی میتوان دقت و سرعت رسیدن به حالت مانای نهایی را بیشتر کرد).هدف ما رسیدن به کمترین زمان برای حالت مانای نهایی سرعت دور موتور است که در ادامه در این رابطه بحث میکنیم.
کنترل دور موتور با فیدبک از سرعت موتور
این پروژه به شکلی طراحی شده تا سرعت دور موتور را به سرعت مورد نظر کاربر برساند.نحوه ی عملکرد پروژه به این شکل است که پس از وارد کردن RPM مورد نظر توسط کاربر سیستم سعی میکند تا RPM حال حاظر را با کم و زیاد کردن به سرعت مورد نظر کاربر برساند.اما برای تحقق این هدف دو راه حل موجود است:
- راه حل اول این است که سرعت دور موتور را هر چند ثانیه یک بار چک کنیم و پس از چک شدن دور موتور با نزدیک شدن دور موتور به حدود مورد نظر به سرعت مورد نظر رسیده ایم.
- راه حل دوم این است که ار روشهای کنترلی مناسب برای رسیدن به سرعت مورد نظر در کمترین زمان استفاده کنیم.این روشها میتواند شامل روشهای ریشه یابی مانند روش نیوتن یا کنترلرهای PID و دیفرانسیلی باشد.
بدون شک استفاده از روشهای کنترل مدرن راه حل کاملی برای رسیدن به سرعت مورد نظر در سریعترین حالت است.در اینجا استفاده از روش نیوتن را مثال میزنیم:
روش نیوتن-رافسون:
روش نیوتن که با عنوان روش نیوتن-رافسون نیز شناخته میشود، یک روش عددی تعین ریشهٔ یک تابع است. فرض کنید تابعی (نمودار آبی) دارید که میخواهید ریشه (محل برخورد تابع با محور xها) آن را بیابید یا به اصطلاح آن را حل کنید. در روش نیوتن رافسون ابتدا x0 را به عنوان حدس اولیه وارد فرمول زیر میکنیم تا x1 بدست آید. به همین ترتیب ادامه میدهیم و این بار x1 را در فرمول قرار میدهیم.
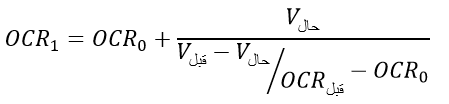
در این روش هدف ما بدست آوردن سرعت مورد نظر است که همان ریشه ی معادله های سرعت چرخش و OCR داده شده به سیستم است.که اگر بخواهیم روش نیوتن را برای همین حالت میکرو پیاده کنیم هر بار باید بر اساس فرمول زیر OCR جدید را بدست آوریم:
رابظه ی سرعت با OCR میکرو
بدست آوردن OCR برای بهبود سرعت روی سرعت مورد نظر که همان V0 است
در روابط بالا فقط مقدار K نامعلوم است که با استفاده از یک زیر برنامه ی کالیبره سازی مقدار K مشخص خواهد شد و پس از آن با تغییر مقدار V0 به سرعت OCR جدید به دست آمده و با OCR جدید سرعت دقیقا برابر V0 خواهد شد.
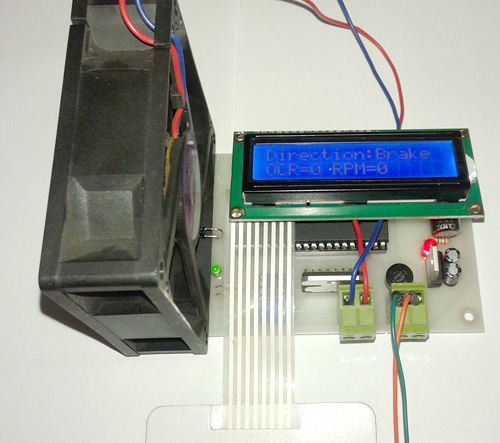
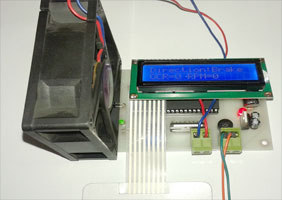
فیلمها و عکسهای پروژه:
محتویات پوشه ی دانلودی:
- فایل برنامه با کدویژن
- فایل پروتیوس PCB و شماتیک
- فایل آلتیوم دیزاینر برای چاپ PCB
 | این پروژه به شکلی طراحی شده تا سرعت دور موتور را به سرعت مورد نظر کاربر برساند.نحوه ی عملکرد پروژه به این شکل است که پس از وارد کردن RPM مورد نظر توسط کاربر سیستم سعی میکند تا RPM حال حاظر را با کم و زیاد کردن به سرعت مورد نظر کاربر برساند |
| توضیحات بیشتر | قیمت : 15000 تومان |









")

")



")




")




")





")




")