
بزرگترین تفاوت بین یک موتور القایی AC و یک موتور سنکرون AC این است که در موتور سنکرون توان روتور به طور مستقیم از یک منبع خارجی تامین میشود. این جریان در روتور نیز خود میدان مغناطیسی تولید خواهد کرد و به دلیل اثر متقابل میدانهای استاتور و روتور، روتور در جهت میدان دوار استاتور به حرکت در خواهد آمد. این پایان نامه انجام شده برای یکی از دوستان کارشناسی ارشد مهندسی برق قدرت بوده و برای دوستان اعضای طلایی فرستاده می شود و به قیمت 1 میلیون تومان برای یه شرکت انجام داده ام. فایل شبیه سازی آنرا هم در ادامه آورده ام. این پروژه در مورد ماشین های القایی سنکرون در حالت های زیر می باشد:
- ماشین سنکرون در حالت کار عادی
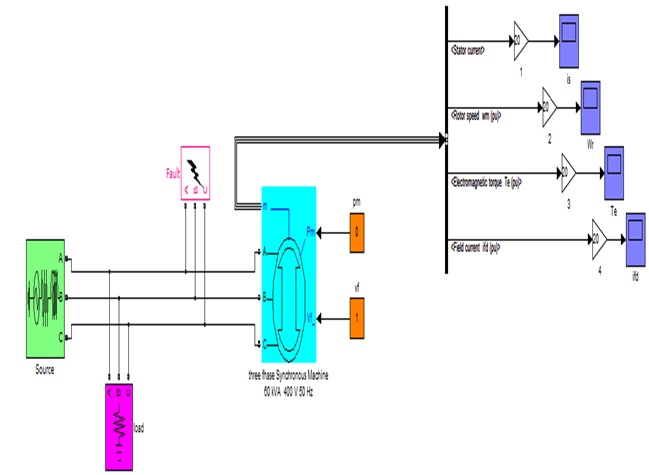
- ماشین سنکرون در حالت خطای اتصال کوتاه
- ماشین سنکرون در حالت اتصال کوتاه تک فاز به زمین
- ماشین سنکرون در حالت اتصال کوتاه دو فاز به زمین
- ماشین سنکرون در حالت اتصال کوتاه دو فاز به زمین
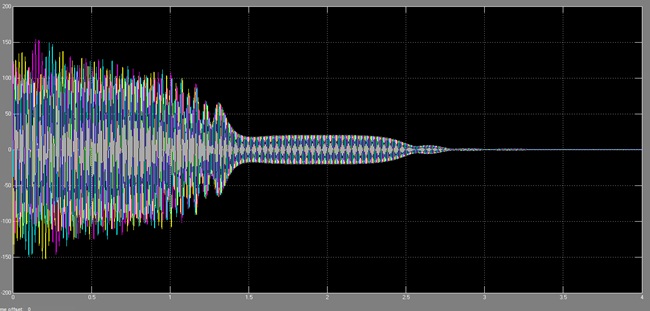
ماشین سنکرون در حالت کار عادی:
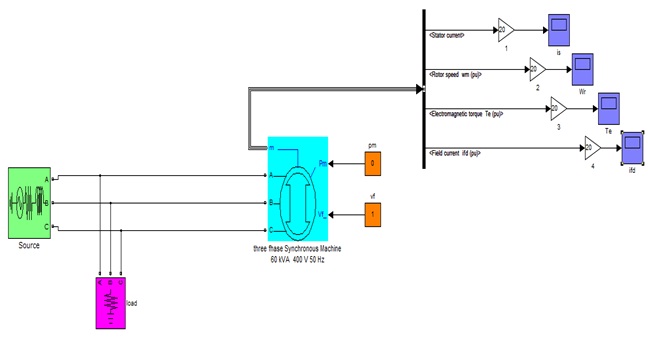
ساختار موتور های القایی
مانند بیشتر موتورها , یک موتورهای القایی AC یک قسمت ایستای بیرونی به نام استاتور و یک گردان که در درون آن می چرخد و روتور نامیده می شود، دارند , که میان آندو یک فاصله ریز و یکنواخت هست. به طور انگاری همه موتورهای الکتریکی از میدان مغناطیسی چرخان برای گرداندن روتورشان بهره می گیرند.یک موتور سه فاز القایی AC تنها نوعی از موتور است که در آن میدان مغناطیسی چرخان بگونه سرشتی از سوی استاتور به خاطر طبیعت تغذیه گر آن ساخته می شود.در حالی که موتورهای DC به وسیله ای الکتریکی یا مکانیکی برای آفریدن این میدان چرخان نیاز دارند.یک موتور القایی AC تک فاز نیازمند یک ابزار الکتریکی بیرونی برای پدید آوردن این میدان مغناطیسی چرخشی است. در درون هر موتور دو سری آهنربای مغناطیسی پیش بینی شده است.در یک موتور القایی AC یک سری از مغناطیس شونده ها به خاطراینکه تغذیه AC به پیچه های استاتور متصل است در استاتور پیش بینی شده اند.بخاطر طبیعت متناوب تغذیه ولتاژ AC بر پایه دستور لنز نیرویی الکترومغناطیسی به گردان اندر می آید (درست همانند ولتاژی که در ثانویه ترانسفورماتور واداشته می شود).بنابر این سری دیگر از مغناطیس شونده ها خاصیت مغناطیسی پیدا می کنند. اندرکنش میان این آهنربا ها توانستار چرخیدن یا گشتاور را فراهم می آورد.و در پی آن، موتور در جهت گشتاور پدید آمده می چرخد.
استاتور(ایستان):
استاتور موتورهای القایی از قطبهای سیمپیچی شدهای تشکیل شده که با گذرجریان از آنها با تولید میدان مغناطیسی در روتور ولتاژ القا میکنند. استاتور یا ایستان از چندین نواره باریک آلومنیوم یا آهن سبک ساخته شده است.این نواره ها بصورت یک استوانه تهی به هم منگنه و سخت شده اند(هسته ایستان).سیم پیچهایی از سیم روکش دار در این شیارها جاسازی شده اند.هر گروه پیچه با هسته ای که آن را فرا گرفته یک آهنربای مغناطیسی (با دو پل) را برای کار کردن با تغذیه AC می سازد.تعداد قطبهای یک موتور القایی AC به اتصال درونی پیچه های ایستان بستگی دارد.پیچه های استاتور مستقیماً به منبع انرژی متصل اند.آنها به گونه ای بسته شده اند که با استواردن تغذیه AC یک میدان مغناطیسی چرخنده پدید آوردن می شود. تعداد قطبها با توجه به سرعت و گشتاور مورد نیاز میتواند مختلف باشد ولی تعداد آنها همواره یک عدد زوج است. روتور (گردان): گردان از چندین بخش جدای باریک فولادی که میانشان میله هایی از مس یا آلومنیوم پیش بینی شده ساخته شده است.روتور موتورهای القایی به دو صورت است:
- روتور قفس سنجابی
- روتور سیمپیچی شده
در رایج ترین نوع روتور (روتور قفس سنجابی) این میله ها در پایانه خود به صورت الکتریکی و مکانیکی از سوی حلقه هایی به هم بسته شده اند.کمابیش 90 درصد از موتورهای القایی دارای روتور قفس سنجابی می باشند و این به خاطر آن است که این نوع روتور ساختی پایدار و ساده دارد.این گردان از هسته ای چند تکه استوانه ای با اهرمی که شکافهای همراستا برای جادادن رسانا ها درون آن دارد پدید آمده است.هر شکاف یک میله مسی یا آلومنیومی یا آلیاژی را می برگیرد.در این میله ها به طور همیشگی از سوی زنجیره های پایانی آنها چرخه کوتاه برقرار است.چون این نوع مونتاژ درست همانند قفس سنجاب است , این نام برای آن گذاشته شده است.میله های گردان دقیقاً با چرخگاه موازی نیستند، به جای آن به دو دلیل مهم قدری اریب کار گذاشته می شوند. 1- دلیل نخست آنکه موتور با کاهش صوت مغناطیسی بدون صدا کارکرده و برای آنکه از هارمونیکها در شکافها کاسته شود. 2- دلیل دوم آن است که گرایش روتور به چفت شدن (Hang) کمتر شود.دندانه های روتور به دلیل جذب مغناطیسی مستقیم میکوشند که در برابر دندانه های استاتور باقی بمانند.این اتفاق هنگامی رخ می دهد که شمار دندانه های روتور و استاتور برابر باشند. روتور از سوی مهار هایی در دو سر چرخگاه سوار شده ; یک سر محور در حالت سرشتی برای فرستادن نیرو بلندتر از طرف دیگر گرفته می شود.ممکن است بعضی موتورها محوری فرعی در دیگر سو(غیر گردنده – غیر فرستنده نیرو) برای هم رسی دستگاههای اندریاب(sensor) حالت (وضعیت) و سرعت داشته باشند.بین ایستان و گردان شکافی هوایی موجود است.بعلت القای توانستار از ایستان به گردان برده می شود.گشتاور پدید آمده به گردان نیرو داده و سپس برای چرخیدن به آن نیرو وارد می کند.
به دلیل مزایای بالای روتورهای قفسی مانند سادگی، هزینه کمتر، نیاز کمتر به تعمیر و نگهداری و… رایجترین روتورها در موتورهای القایی روتورهای قفسی هستند. این روتورها از میلههایی از جنس مس یا آلومینیوم تشکیل شدهاند که یه صورت یک استوانه به همدیگر متصل شدهاند و در دو طرف به وسیله دو حلقه اتصال کوتاه شدهاند. روتورهای سیمپیچی شده در صنعت کاربردهای خاص خود را دارند و بیشتر در موتورهایی که نیاز به گشتاور راهاندازی بالایی دارند مورد استفاده قرار میگیرند.
کنترل سرعت
سرعت چرخش میدان دوار در موتورهای القایی تابع فرکانس منبع و تعداد قطبهای استاتور است. پیش از پیشرفت المانهای الکترونیک قدرت تغییر فرکانس موتورهای القایی به راحتی ممکن نبود و این کاربرد این نوع موتورها را محدود میکرد. روشها گوناگونی برای تغییر سرعت موتورهای القایی وجود دارد ولی رایجترین روش بهرهگیری از ترفند PWM (Pulse Width Modulation) یا آمیختگی پهنای فرکانس است، که در آن یک موج ac به طور یکنواخت و سرعتی قابل تنظیم قطع و وصل میشود. با این روش میتوان توان وروردی متوسط موتور را کنترل کرد.
راهاندازی
همانطور که گفته شد در موتورهای القایی رابطهای مستقیم بین مقدار لغزش و مقدار جریان القایی در روتور وجود دارد. به این ترتیب بیشترین میزان جریان القایی در روتور در هنگام راهاندازی (لغزش ۱) به وجود میآید. در این حالت موتور مانند ترانسفورماتوری عمل خواهد کرد که سیمپیچ ثانویه آن اتصال کوتاه شده باشد؛ بالا بودن جریان القا شده در روتور موجب بالا رفتن جریان استاتور میشود و به همین دلیل میزان جریان راهاندازی در استاتور تقریباً بین ۵ تا ۹ برابر جریان در بار کامل است. جریان بالای موتور در لحظه راهاندازی میتواند باعث افت ولتاژ در بقیه مصرف کننده شود اما این جریان بالا در موتور زیاد ادامه پیدا نمیکند چون با راه افتادن موتور لغزش به تدریج کاهش یافته و میزان جریان استاتور نیز کاهش مییابد. در صورتی که بار موتور در لحظه راهاندازی به اندازهای باشد که موتور قادر به چرخش نباشد جریان بالا موجب سوختن سیمپیچ استاتور خواهد شد. برای جلوگیری از افزایش بیش از حد جریان در موتور از راهاندازها برای کاهش ولتاژ راهاندازی و محدود سازی جریان راهاندازی استفاده میکنند این راهاندازها طوری طراحی شدهاند که با رسیدن موتور به سرعت متوسط ولتاژ را افزایش دهند.
| حداقل اشتراک | محتویات | زمان ایجاد | حجم فایل | تعداد دانلودها |
اشتراک طلایی  |
متلب | جمعه, 03 آبان 1392 00:23 | 1.02 MB | 0 |
تنها کاربران عضو یا دارای مجوز میتوانند دانلود نمایند |









")

")



")




")




")





")




")