
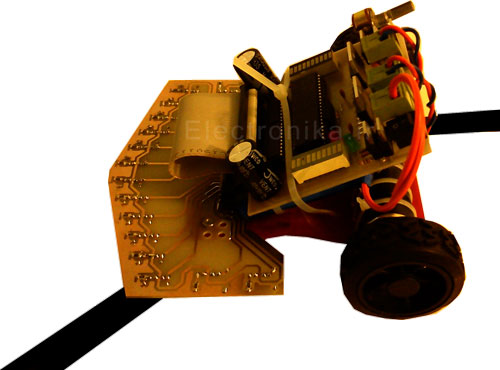
با توجه به در خواست کاربران برای کاهش تعداد سنسور های ربات 24 سنسوره اقدام به طراحی ربات 16 سنسوره با برنامه جدید و کاملتر در دو ورژن pid وساده کردیم .در این ربات علاوه بر تغیرات سخت افزاری و کاهش تعداد سنسورها برنامه ربات به صورت pid نیز اضافه شده.شما با دانلود سورسهای برنامه میتوانید با نحوره ی برنامه نویسی pid برای رباتهای مسیر یاب آشنا شوید.و همچنین با افزوده شدن راهنمای ساخت ربات به صورت pdf به راحتی میتوانید ربات را منتاژ و عیب یابی کنید.دربرنامه ربات قابلیت عبور از لوپ و INVERT و زیگ زاگ و بریدگی هم وجود دارد که برنامه کامل آنرا میتوانید در پوشه دانلودی مشاهده کنید.
ربات PID چیست:
کنترلکننده پیآیدی (proportional–integral–derivative controller (PID controller) از رایجترین نمونههای الگوریتم کنترل بازخوردی است که در بسیاری از فرایندهای کنترلی نظیر کنترل سرعت موتور DC، کنترل فشار، کنترل دما و... کاربرد دارد. کنترل کننده PID مقدار «خطا» بین خروجی فرایند و مقدار ورودی مطلوب (setpoint) محاسبه میکند. هدف کنترلکننده، به حداقل رساندن خطا با تنظیم ورودیهای کنترل فرایند است. کنترل کننده PID، که یک کنترل کننده سه بخش می باشد، شامل بخش های تناسبی، انتگرال گیری، و مشتق گیری است، پر کاربرد ترین کنترل کننده در صنعت است، به طوری که حدود نود درصد کل کنترل کننده های مورد استفاده در صنعت، یا PID هستند، و یا از آن در ساختار های کنترلی دیگر استفاده می کنند. این امر نشان دهنده اهمیت این کنترل کننده است.
مزیت های ربات مسیر یاب pid:
یک ربات مسیر یاب Pid مزیتهایی نسبت به ربات غیر pid خواهد داشت که این بهبودها به دلیل اضافه شدن کنترلر pid به هر سیستم کنترلی خواهد بود:
- افزایش سرعت محاسبات به جای استفاده از روش سنتی if های متوالی و در نتیجه کاهش خطا
- از بین رفتن خطای ماندگار سیستم
- افزایش سرعت ربات مسیر یاب pid در تعقیب خط
- حرکت بهتر و بدون لرزش ربات در بین خطوط
- حرکت ربات به نحوی که خط دقیقا در مرکز ربات باشد (البته باید ضرایب pid درست اعمال گردد)
نکات راه اندازی:
- در مرحله ی اول باید بدانید که رگولاتور اصلی خیلی اهمیت دارد زیرا رگولاتور های مدل هر چند درست کار میکنند ولی آمپر کافی را تامین نمیکنند و باعث داغ شدن بیش از حد رگولاتور و سوختن آن خواهد شد.
- برنامه روی 8 مگا هرتز میباشد و میتوانید از کریستال خارجی 16 مگا هرتز نیز استفاده کنید.
- درایور L6203 باید از نوع اصلی تهیه شود و نوع ریکاور شده آمپر کافی را تامین نمیکند.
- هیت سینک برای رگولاتورها قرار داده شود.
- نوع باتری باید باتری لیتیوم یون باشد و تعداد سلول ها میتواند 5 یا 6 عدد باشد و میتوان برای تامین ولتاژ باتری را به شکل سه سر با 3 ولتاژ مختلف بست تا رگولاتورهای مربوطه داغ نکنند.
بهبودهای این ورژن:
با توجه به مشکلاتی که در روباتهای قبلی وجود داشت در این ورژن مشکلات قبلی تصحیح شده و این ورژن بهبودهایی به شرح زیر دارد:
- حذف تمامی رگولاتورها و کاهش رگولاتور ها به 4 عدد و فقط از نوع lm317
- تغییرات در مدار درایور برای جلوگیری از سوختن درایور های 6203 زیرا در ورژنهای قبل اکثراً مدار درایور بعد از مدتی دچار مشکل میشد.
- برنامه نویسی بسکام به همراه کامنت اضافه شده است
- برنامه نویسی C به همراه کامنت اضافه شده است
- تمامی فایلهای سورس به طور کامل قرار داده شده است
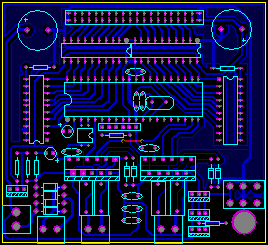
- PCB روبات بهتر طراحی شده و فقط 1 عدد جامپر داریم.
- اضافه شدن خازن تانتالیوم برای حذف نویز روی پایه های تغذیه میکرو.
در هنگام برش لیزر حتما توجه شود که سایز مربع دور تا دور فایل 15 در 14 سانتی متر است و باید با این سایز به نرم افزار انتقال پیدا کند.
محتویات پوشه:
- فایل سورس PCB با پروتل و پروتیوس
- فایل سورس کدویژن (برنامه ی بسکام همین ربات را میتوانید از این لینک دریافت نمایید)
- فایل اتوکد
 | در این ربات علاوه بر تغیرات سخت افزاری و کاهش تعداد سنسورها برنامه ربات به صورت pid نیز اضافه شده.شما با دانلود سورسهای برنامه میتوانید با نحوره ی برنامه نویسی pid برای رباتهای مسیر یاب آشنا شوید.و همچنین با افزوده شدن راهنمای ساخت ربات به صورت pdf به راحتی میتوانید ربات را منتاژ و عیب یابی کنید.دربرنامه ربات قابلیت عبور از لوپ و INVERT و زیگ زاگ و بریدگی هم وجود دارد که برنامه کامل آنرا میتوانید در پوشه دانلودی مشاهده کنید. |
| توضیحات بیشتر | قیمت : 90000 تومان |









")

")



")




")




")





")




")