
سروموتور (به انگلیسی: Servo motor) یا موتور کنترل (به انگلیسی: Control motor) نوعی از موتورهای الکتریکی است که با هدف بکارگیری در سیستمهای کنترل فیدبک طراحی میشود. لختی (اینرسی) در این موتورها پایین بوده و در نتیجه تغییر سرعت در این موتورها بسیار سریع است. معمولاً قطر این موتورها کم اما درازای آنها زیاد میباشد.اما نسبت به موتورهای معمولی قیمت بالایی دارند.این موتور ها بر اساس یک سیگنال PWM قابل کنترل هستند و میزان زاویه ای که میچرخند به بر اساس پهنای پالس ارسالی خواهد بود.سرووموتورها در دو نوع ساخته میشوند:
- سرووموتورهای جریان مستقیم (DC)
- سرووموتورهای جریان متناوب (AC)
دانلود پروژه ی سرو موتور:
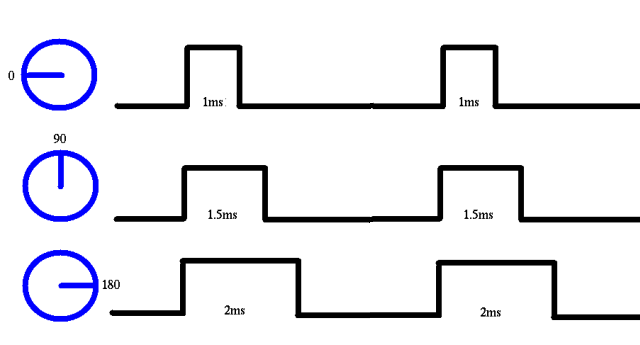
همانطور که می دانید سروو موتور ها موتورهایی هستند که قابلیت چرخش دقیق در زاویه های 0 تا 360 درجه (البته نه در همه مدل ها ) دارند . این موتور ها اکثرا در ربات ها و جاهایی که نیاز به چرخش دقیق وجود دارد استفاده می شود ( مثل موتور دوربین مدار بسته ) . برای چرخش این موتور ها نیاز است یک پالس بر روی پایه وسط اعمال کنید که این پالس قوانین خاصی دارد . این پالس دارای فرکانس خاصی باید باشد ( معمولا 50 تا 100 هرتز ) و عرض پالس مثبت آن باید بین یک تا 2 میلی ثانیه باشد . زمانی که یک میلی ثانیه است موتور کاملا به سمت چپ می رود . هنگامیکه 2 میلی ثانیه است موتور کاملا به سمت راست می چرخد و در حالتیکه 1.5 میلی ثانیه است موتور در حالت وسط قفل می شود . به نظر کار ساده ای می آید ولی ساخت چنین پالسی با میکرو کار ساده ای هم نیست زیرا شما باید تایمر ها را طوری تنظیم کنید که این پالس در هر لحظه پهنای خاصی داشته باشد . پروژه ای برای شما آماده کرده ایم که بسیار ساده با تنظیم OCR و PWM به موتور جهت بدهید . با زدن هر کدام از کلید ها موتور به یک جهت مایل می شود . در صورتیکه کلیدی نزدید در وسط قرار گیرد . از این پروژه می توانید برای کنترل چرخ جلوی ربات و یا حرکت بازوی ربات و حتی چرخیدن دوربین مدار بسته محل کارتان استفاده نمایید .
ساختمان داخلی سروو موتور:
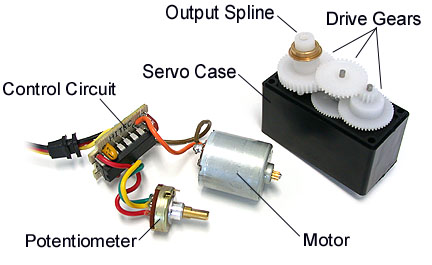
در ویدیو قرار داده شده ساختمان داخلی سروو موتور به خوبی تشریح شده است در یک سروو موتور چندین بخش مختلف وحود دارد که بر اساس عکس زیر به سه بخش اصلی زیر تقسیم میشود:
1- کلید قطع گردش که وقتی به 360 درجه رسید گردش متوقف میشود که در .اقع یک مقاومت متغییر است.
2-گیربکس برای افزایش قدرت.
3-آیسی که بر اساس پهنای پالس زمان گردش را تعیین میکند.
مشخصات پروژه :
- زبان برنامه نویسی : سی ، C
- شبیه سازی : پروتئوس
- کامپایلر : کدوِیژن
- میکرو : Atmega16









")

")



")




")




")





")




")