سایت در حال به روز رسانی به نسخه ی جدید میباشد در صورت بروز مشکل با شماره ی 09213203841 تماس بگیرید
طراحی پروژه های صنعتی
پروژه های صنعتی میباسیت بر اساس قابلیتهای خاص و امکانات ویژه بر اساس خواست کارفرما طراحی گردد و تمامی امکانات خواسته شده در پروژه لحاظ شود.همچنین مراحل تست پروژه در محیط مورد نظر اجرا شود.پروژه های صنعتی باید بر اساس کمترین قیمت تمام شده طراحی شوند.گروه FZA با در نظر گرفتن کلیه موارد نیازمند ارائه ی تمامی جزیات پروژه از طرف کارفرما و در قرارداد فیمابین میباشد.
چاپ و طراحی PCB
شما میتوانید به صورت آنلاین طرح های pcb خود را به صورت تک لایه و چند لایه سفارش دهید.به منظور بهبود کیفیت،تقاضا میشود برای کاهش تقریبی 50 درصدی قیمت و زمان تولید انواع بردهای نمونه (زیر 5000cm مربع) حتی الامکان در قسمت سفارش آنلاین جهت انتخاب رنگ چاپ محافظ ،رنگ سبز و ضخامت برد مدارچاپی،ضخامت 1.6mm را انتخاب نمایید.
بسته های روباتیک
بسته های روباتیک FZA توسط گروه زاگرس الکترونیک با هدف پرورش خلاقیت و شکوفایی استعدادها و همچنین بالا بردن توان علمی و مهارتی افراد، متناسب با هر گروه سنی و تولید برنامه آموزشی متناسب با آن گروه طراحی و ارائه میگردد.FZA با رویکردی جدید و با محصولاتی متنوع به این عرصه وارد شده تا با ایجاد محصولاتی با کیفیت علاقه مندان به این علم را در پیشرفت و شکوفایی یاری بخشد.
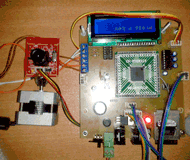
ربات مسیریابی که معرفی می گردد دارای مشخصات زیر می باشد :
1 ) دارای 15 سنسور LTH1550 که نویز پذیری محیطی آن بسیار پایین است.
2 ) دارای 2 موتور گیربکس 800RPM که علاوه بر سرعت، دارای قدرت لازم در برخورد با موانع و شرایط ویژه می باشد.
3 ) دارای درایور دو طرفه L298 با قابلیت تحمل جریان 2 آمپر.
4 ) دارای آی سی میکروکنترلر ATmega16 با فرکانس داخلی 8MHz.
5 ) دارای 15 مولتی ترن برای تنظیم دقیق سنسورها در شرایط محیطی مختلف.
6 ) دارای 8 آی سی آپ امپ LM358 برای تبدیل خروجی آنالوگ سنسورهای IR به خروجی دیجیتال.
7 ) دارای تغذیه 12 ولت و رگولاتورهای 7808 و 7805 برای کاهش تدریجی ولتاژ ورودی به 5 ولت.
8 ) استفاده از برد فایبرگلاس برای سوار کردن قطعات به منظور استحکام بیشتر برد.
9 ) استفاده از شاسی پلکسی برای استحکام بیشتر ربات.
10 ) استفاده از تلق پلکسی مشکی برای سوار کردن بردهای الکترونیکی و زیبایی ربات.
11 ) استفاده از چرخ های5/5 سانتی متری ( بدون احتساب روکش ) از جنس تفلون، برای عکس العمل سریع ربات در پیچ و خم های مسیر مسابقه.
نظیم سرعت ربات :
این ربات مسیریاب دارای قابلیت تغییر سرعت توسط دیپ سوئیچ 4 تایی تعبیه شده بر روی برد اصلی است. استفاده از این قابلیت ربات بدین صورت است :
1 ) اگر کلید 1 در حالت ON و 3 کلید دیگر در حالت OFF باشد : در این حالت ربات دارای کمترین و مطمئن ترین سرعت می باشد. برای مسابقات که در آنها می توان چندین رکورد را ثبت نمود، معمولا پیشنهاد می شود که برای اولین رکورد از سرعت کم و مطمئن ربات استفاده شود تا ربات بتواند تمام مسیر مسابقه را برای یک بار هم که شده، به صورت کامل طی نماید.
2 ) اگر کلید 2 در حالت ON و 3 کلید دیگر در حالت OFF باشد : در این حالت ربات دارای سرعت بیشتری نسبت به حالت اول است. ناپایداری ربات در این حالت بیشتر از حالت اول خواهد بود.
3 ) اگر کلید 3 در حالت ON و 3 کلید دیگر در حالت OFF باشد : در این حالت، ربات دارای سرعت بیشتری نسبت به دو حالت قبلی خواهد بود.
4 ) اگر کلید 4 در حالت ON و 3 کلید دیکر در حالت OFF باشد : در این حالت ربات دارای بیشترین سرعت است که این امر باعث ناپایداری بیشتر ربات در طی کردن پیچ و خم های مسیر خواهد شد. با استفاده از روش های مختلفی که در قسمتهای بعدی در مورد آنها توضیح خواهم داد می توان این ناپایداری را به حداقل کاهش داد.
این روبات قابلین حرکت بر روی محیطهای رنگی را نیز دارد زیرا با ولمها میتوان روبات را برای هر محیطی آماده کرد.
بهتر است نام و نظر خود را فارسی تایپ کنید ( برای انتشار سریع نظر یا افزودن فایل پیوست، باید وارد حساب کاربری خود شوید )
در باره ما
ما معتقدیم هیچ کاری بدون همکاری گروهی به نتیجه نمی رسد. از این رو کاربران خود را به مشارکت برای رسیدن به بهترین سایت نرم افزاری دنیای اینترنت دعوت می کنیم.ما می خواهیم کاربران خود را شناسایی کنیم و به آنهایی که پیشرفت سایت برایشان مهم است خدمات بهتری ارائه کنیم.
الکترونیکا چگونه کار می کند؟
سعی در ارائه همه فایلها به صورت لینک مستقیم پرسرعت داشته است.
ما بهترین نرم افزارها و پروژه های تست شده را انتخاب کرده ایم نه هر نرم افزاری با هر کیفیتی.
ما همه فایلها را تست کرده و در سایت می گذاریم. مگر موارد بسیار نادر که به آنها مطمئن هستیم.
بخشی به نام درخواست نرم افزار برای سایر نرم افزارهای مورد نیاز طراحی کرده ایم.
همیشه در بخش ارتباط با ما در حداقل زمان پاسخگو بوده ایم.










")