
روبات جارو برقي داراي چند حالت حركتي است :1. بدون مسير در حالت بدون مسير روبات داراي دو سنسور براي محاسبه ي مسير طي شده است تا روبات دو بار يك مكان را جاروب ننمايد اين حالت براي مسير هاي كوتاه است و مكانهايي كه مسير مشخصي را ندارند يا براي هنگامي كه روبات مسير را گم ميكند بسيار به كار مي ايد .سنسور به كار رفته يك شمارنده است كه از روي اسكرول موس جدا شده و بر روي چرخها نصب شده است.2. با مسير مشخص شده با بررسي هاي انجام شده مشخص شد روبات بدون مسير، هرگز مسيرمستقيم را طي نميكند و خطا هاي موجود در ساختار مكانيكي و الكترونيكي باعث ميشود روبات كج حركت كند مگر اين كه از پردازش تصوير استفده كنيم تا روبات مسير مستقيم را طي نمايد يا اين كه از يك نشانه براي مسير استفاده كرد.در روباتهاي جاروبرقي كه اكنون در بازار موجود ميباشند نشانه گذاري در مسير الزامي است يعني يك سري وسايل همراه روبات ارائه ميگردد تا نشانه گذاري در مسير توسط خود ما انجام شود و روبات در آن مسيرهاي مشخص كار انجام ميدهد. نشانه هاي ميتوانند به چندين روش اجرا شوند:
- روش خطوط رنگي در اين روش يك سري خطوط رنگي در مسير قرار ميدهيم و روباط اين خطوط را دنبال ميكند ولي اشكال اين كار اين است كه خطوط قابل ديد است و شايد در برخي مكانها امكان خط كشي نباشد.
- روش الكترو مغناصيسي پالسهاي كد شده در مسير روبات را راهنمايي ميكنند .اين پالسها بسيار خوب عمل ميكنند ولي نياز به تغذيه دارند و مصرف برق را بالا ميبرند.
- پردازش تصوير اين روش مناسبترين روش است ولي نياز به پردازنده هاي قوي مبباشد و هزينه ي روبات را بالا ميبرد . از بين روشهاي بالا ما خصوط رنگي را انتخاب كريدم تا روبات مانند يك روبات مسير ياب خطوط را دنبال كند و در طول مسير محيط را جاروب نمايد.
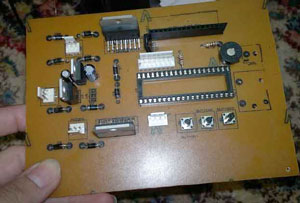
عکسهایی از بخشهای مختلف روبات
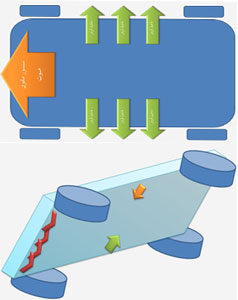

ساخت بخش جمع کننده آشغال

| حداقل اشتراک | محتویات | زمان ایجاد | حجم فایل | تعداد دانلودها |
رایگان  |
برنامه+شماتیک | شنبه, 08 تیر 1392 18:37 | 57.11 KB | 0 |
تنها کاربران عضو یا دارای مجوز میتوانند دانلود نمایند |
| حداقل اشتراک | محتویات | زمان ایجاد | حجم فایل | تعداد دانلودها |
| رایگان |
شنبه, 08 تیر 1392 18:41 | 8.27 MB | 0 |
تنها کاربران عضو یا دارای مجوز میتوانند دانلود نمایند |









")

")



")




")




")





")




")